В теории трехмерного вращения , формула вращения Родриги , названная в честь Олинд Родригли , является эффективным алгоритмом для вращения вектора в пространстве, дала ось и угол поворота . В более широком смысле, это можно использовать для преобразования всех трех базисных векторов для вычисления матрицы вращения в SO (3) , группе всех матриц вращения, из представления ось-угол . Другими слова, формула Родриги обеспечивает алгоритм для вычисления экспоненциального отображения из так (3) , то алгебры Ли из SO (3) , к SO (3) без фактического вычисления полной матричной экспоненты.
Заявление
Если v - вектор в ℝ 3, а k - единичный вектор, описывающий ось вращения, вокруг которой v вращается на угол θ согласно правилу правой руки , формула Родригеса для повернутого вектора v rot имеет вид

Смысл приведенной выше формулы состоит в том, что первый член масштабирует вектор вниз, а второй наклоняет его (посредством сложения векторов ) к новому положению вращения. Третий член повторно добавляет высоту (относительно ), потерянную первым членом.

Альтернативное утверждение состоит в том, чтобы записать вектор оси как произведение a × b любых двух ненулевых векторов a и b, которые определяют плоскость вращения, а угол θ измеряется от a к b . Полагая α обозначить угол между этими векторами, два угла & thetas ; и α не обязательно равны, но они измеряются в том же самом смысле. Тогда вектор единичной оси можно записать

Эта форма может быть более полезной, когда задействованы два вектора, определяющие плоскость. Примером в физике является прецессия Томаса, которая включает вращение, заданное формулой Родригеса, в терминах двух неколлинеарных скоростей наддува, а ось вращения перпендикулярна их плоскости.
Вывод
Формула вращения Родригеса вращает
v на угол
θ вокруг вектора
k , разлагая его на компоненты, параллельные и перпендикулярные
k , и вращая только перпендикулярный компонент.

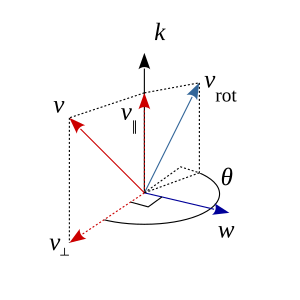
Векторная геометрия формулы вращения Родригеса, а также разложение на параллельную и перпендикулярную составляющие.
Пусть k будет единичным вектором, определяющим ось вращения, и пусть v будет любым вектором, который вращается вокруг k на угол θ ( правило правой руки , против часовой стрелки на рисунке).
Используя скалярное произведение и кросс-произведение , вектор v можно разложить на компоненты, параллельные и перпендикулярные оси k ,

где компонент, параллельный k, равен

называется вектор проекции из V на к , и компонент , перпендикулярной к является

называется вектор отказ от V от к .
Вектор k × v можно рассматривать как копию v ⊥, повернутую против часовой стрелки на 90 ° относительно k , поэтому их величины равны, но направления перпендикулярны. Точно так же вектор k × ( k × v ) копия v ⊥ повернут против часовой стрелки на 180 ° вокруг k , так что k × ( k × v ) и v ⊥ равны по величине, но в противоположных направлениях (т.е. другое, отсюда и знак минус). Расширение векторного тройного произведения устанавливает связь между параллельными и перпендикулярными компонентами, для справки формула имеет вид a × ( b × c ) = ( a · c ) b - ( a · b ) c для любых трех векторов a , b , c .
Компонент, параллельный оси, не изменит ни величину, ни направление при вращении,

только перпендикулярный компонент изменит направление, но сохранит свою величину, согласно

и поскольку k и v ∥ параллельны, их перекрестное произведение равно нулю k × v ∥ = 0 , так что

и это следует

Этот поворот правильный, поскольку векторы v ⊥ и k × v имеют одинаковую длину, а k × v - это v ⊥, повернутые против часовой стрелки на 90 ° вокруг k . Соответствующее масштабирование v ⊥ и k × v с использованием тригонометрических функций синуса и косинуса дает повернутую перпендикулярную составляющую. Форма повернутого компонента аналогична радиальному вектору в двумерных плоских полярных координатах ( r , θ ) в декартовом базисе.

где e x , e y - единичные векторы в указанных направлениях.
Теперь полный повернутый вектор

Подставляя определения v rot и v ⊥rot в уравнение,
получаем

Матричные обозначения
Представляя v и k × v как матрицы столбцов , перекрестное произведение может быть выражено как матричное произведение

Позволить К обозначают « матрицу кросс-продукт » для единичного вектора к ,
![{\ displaystyle \ mathbf {K} = \ left [{\ begin {array} {ccc} 0 & -k_ {z} & k_ {y} \\ k_ {z} & 0 & -k_ {x} \\ - k_ {y} & k_ {x} & 0 \ end {array}} \ right] \ ,,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/734b982cadf1ec3e27f95a27ffa3f77723897261)
то есть

для любого вектора v . (Фактически, K - единственная матрица с этим свойством. Она имеет собственные значения 0 и ± i ).
Отсюда следует, что итерация перекрестного произведения эквивалентна умножению на матрицу перекрестного произведения слева; конкретно:

Таким образом, предыдущая формула поворота на матричном языке выглядит так:

Итак, у нас есть:

Обратите внимание, что коэффициент перед главным членом теперь равен 1 в этой записи: см. Обсуждение группы Ли ниже.
Факторизация v позволяет получить компактное выражение

куда

- матрица поворота на угол θ против часовой стрелки вокруг оси k , а I - единичная матрица 3 × 3 . Эта матрица R является элементом группы вращений SO (3) из ℝ 3 , и К представляет собой элемент алгебры Ли генерации , что группа Ли (заметим , что К кососимметричен, который характеризует ).

В терминах матричной экспоненты

Чтобы убедиться, что последняя идентичность сохраняется, нужно отметить, что

характеристика однопараметрической подгруппы , т. е. экспоненциальной, и что формулы совпадают для бесконечно малых θ .
Для альтернативного вывода, основанного на этой экспоненциальной зависимости, см. Экспоненциальную карту от до SO (3) . Для обратного отображения см. Отображение журнала из SO (3) в .
Ходдж двойного вращения просто , что позволяет извлечение как оси вращения и синус угла вращения от вращения матрицы сам по себе, с обычной неоднозначностью,


![{\ Displaystyle {\ begin {align} \ sin (\ theta) & = \ sigma \ left | \ mathbf {R} ^ {*} \ right | \\ [3pt] \ mathbf {k} & = - {\ frac {\ sigma \ mathbf {R} ^ {*}} {\ left | \ mathbf {R} ^ {*} \ right |}} \ end {выровнено}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/10873523f1f1da4c1076c46e476b9ee80e324782)
где . Приведенное выше простое выражение является результатом того факта, что двойники Ходжа к и равны нулю, и .




Однако при применении формулы Родригеса обычная двусмысленность может быть устранена с помощью расширенной формы формулы.
Смотрите также
использованная литература
-
Леонард Эйлер , "Problema algebraicum obffectiones prorsus singulares memorabile", комментарий 407 Indicis Enestoemiani, Novi Comm. Акад. Sci. Petropolitanae 15 (1770), 75–106.
-
Олинд Родриг , "Des Лоис géométriques Квайте régissent ль déplacements d'ООН système солид данс l'Espace, и де л варьирование де coordonnées provenant де КЕС déplacements considérés дез вызывает Независимая Квай peuvent ле produire", Журнал де Mathématiques Pures и др Appliquées 5 (1840 ), 380–440. онлайн .
- Дон Кокс, (2006) Исследования в области математической физики , Springer Science + Business Media, LLC. ISBN 0-387-30943-8 . Глава 4, стр. 147 и след. Круговой путь к геометрической алгебре
-
↑ Лян, Куо Кан (2018). «Эффективное преобразование вращающейся матрицы в ось и угол вращения путем расширения формулы Родригеса». arXiv : 1810.02999 [ cs ].
внешние ссылки


