Преобразование координат через угол
Х -Cartesian системы координат поворачивается на угол к
Ему -Cartesian системы координат 
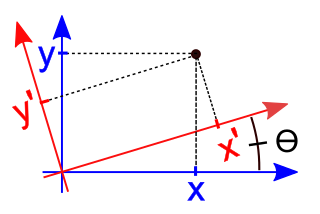
В математике , A поворот осей в двух измерениях является отображением из х - декартова системы координат к Ему -Cartesian системы координат , в которой начало координаты сохраняются фиксированными и х ' и у» оси получаются поворот оси x и y на угол против часовой стрелки . Точка P имеет координаты ( x , y ) относительно исходной системы и координаты ( x ' , y' ) относительно новой системы. В новой системе координат точка P будет казаться повернутой в противоположном направлении, то есть по часовой стрелке на угол . Аналогично определяется вращение осей более чем в двух измерениях. Вращение осей - это линейная карта и жесткое преобразование .
Мотивация
Системы координат необходимы для изучения уравнений кривых методами аналитической геометрии . Для использования метода координатной геометрии оси располагаются в удобном месте по отношению к рассматриваемой кривой. Например, для изучения уравнений эллипсов и гипербол , то фокусы , как правило , расположены на одной из осей и расположены симметрично относительно начала координат. Если кривая (гипербола, парабола , эллипс и т.д.) , не расположен удобно по отношению к осям, система координат должна быть изменена , чтобы поместить кривую в удобном и привычном месте и ориентации. Процесс внесения этого изменения называется преобразованием координат .
Решения многих проблем можно упростить, повернув оси координат для получения новых осей через то же начало координат.
Вывод
Уравнения, определяющие преобразование в двух измерениях, которое поворачивает оси xy против часовой стрелки на угол в оси x'y ' , выводятся следующим образом.
В ху системе, пусть точка Р имеет полярные координаты . Тогда, в Ей системе P будет иметь полярные координаты .


Используя тригонометрические функции , мы имеем
-
 |
|
( 1 )
|
-
 |
|
( 2 )
|
и используя стандартные тригонометрические формулы для разностей, имеем
-
 |
|
( 3 )
|
-
 |
|
( 4 )
|
Подставляя уравнения ( 1 ) и ( 2 ) в уравнения ( 3 ) и ( 4 ), получаем
-
 |
|
( 5 )
|
-
 |
|
( 6 )
|
Уравнения ( 5 ) и ( 6 ) могут быть представлены в матричной форме как

которое является стандартным матричным уравнением вращения осей в двух измерениях.
Обратное преобразование
-
 |
|
( 7 )
|
-
 |
|
( 8 )
|
или же

Примеры в двух измерениях
Пример 1
Найдите координаты точки после поворота осей на угол , или 30 °.


Решение:


Оси повернуты против часовой стрелки на угол, а новые координаты равны . Обратите внимание, что точка, похоже, была повернута по часовой стрелке относительно фиксированных осей, поэтому теперь она совпадает с (новой) осью x ' .


Пример 2
Найдите координаты точки после поворота осей по часовой стрелке на 90 °, то есть на угол или -90 °.


Решение:

Оси были повернуты на угол , который по часовой стрелке, а новые координаты равны . Опять же, обратите внимание, что точка, похоже, была повернута против часовой стрелки относительно фиксированных осей.


Вращение конических секций
Наиболее общее уравнение второй степени имеет вид
-
 ( не все нулевые). 
|
|
( 9 )
|
Путем изменения координат (вращения осей и перемещения осей ) уравнение ( 9 ) может быть преобразовано в стандартную форму , с которой обычно легче работать. Всегда можно повернуть координаты так, чтобы в новой системе не было члена x'y ' . Подставляя уравнения ( 7 ) и ( 8 ) в уравнение ( 9 ), получаем
-
 |
|
( 10 )
|
где
-
     
|
|
( 11 )
|
Если выбрано так, что у нас будет и член x'y ' в уравнении ( 10 ) будет равен нулю.


Когда возникает проблема с B , D и E, отличными от нуля, их можно устранить, выполнив последовательно поворот (исключив B ) и перевод (исключив члены D и E ).
Обозначение повернутых конических секций
Невырожденное коническое сечение, задаваемое уравнением ( 9 ), можно идентифицировать путем оценки . Коническое сечение:


Обобщение на несколько измерений
Предположим, что прямоугольная система координат xyz вращается вокруг своей оси z против часовой стрелки (если смотреть вниз по положительной оси z ) на угол , то есть положительная ось x сразу же поворачивается в положительную ось y . Г координата каждой точки остается неизменным , а х и у координаты преобразования , как описано выше. Старые координаты ( x , y , z ) точки Q связаны с ее новыми координатами ( x ' , y' , z ' ) соотношением

Обобщая до любого конечного числа измерений, матрица вращения - это ортогональная матрица, которая отличается от единичной матрицы не более чем четырьмя элементами. Эти четыре элемента имеют форму

-
 а также
а также 
для некоторых и некоторых i ≠ j .
Пример в нескольких измерениях
Пример 3
Найдите координаты точки после поворота положительной оси w на угол , или 15 °, в положительную ось z .


Решение:


Смотрите также
Заметки
-
^ Проттера & Морри (1970 , стр. 320) Ошибка harvtxt: цель отсутствует: CITEREFProtterMorrey1970 ( справка )
-
↑ Антон (1987 , с. 231)
-
↑ Burden & Faires (1993 , стр. 532).
-
↑ Антон (1987 , стр.247)
-
^ Борегард & Fraleigh (1973 , стр. 266)
-
^ Проттера & Морри (1970 , стр. 314-315) Ошибка harvtxt: цель отсутствует: CITEREFProtterMorrey1970 ( справка )
-
^ Проттера & Морри (1970 , стр. 320-321) Ошибка harvtxt: цель отсутствует: CITEREFProtterMorrey1970 ( справка )
-
↑ Антон (1987 , с. 230)
-
^ Проттера & Морри (1970 , стр. 320) Ошибка harvtxt: цель отсутствует: CITEREFProtterMorrey1970 ( справка )
-
^ Проттер и Морри (1970 , стр. 316) Ошибка harvtxt: цель отсутствует: CITEREFProtterMorrey1970 ( справка )
-
^ Проттера & Морри (1970 , стр. 321-322) Ошибка harvtxt: цель отсутствует: CITEREFProtterMorrey1970 ( справка )
-
^ Проттера & Морри (1970 , стр. 324) Ошибка harvtxt: цель отсутствует: CITEREFProtterMorrey1970 ( справка )
-
^ Проттера и Морри (1970 , стр. 326) Ошибка harvtxt: цель отсутствует: CITEREFProtterMorrey1970 ( справка )
-
↑ Антон (1987 , с. 231)
-
↑ Burden & Faires (1993 , стр. 532).
Рекомендации
-
Антон, Ховард (1987), Элементарная линейная алгебра (5-е изд.), Нью-Йорк: Wiley , ISBN 0-471-84819-0
-
Beauregard, Raymond A .; Фрали, Джон Б. (1973), Первый курс линейной алгебры: с дополнительным введением в группы, кольца и поля , Бостон: Houghton Mifflin Co. , ISBN 0-395-14017-X
-
Бэрден, Ричард Л .; Faires, J. Douglas (1993), Численный анализ (5-е изд.), Boston: Prindle, Weber and Schmidt , ISBN 0-534-93219-3
-
Protter, Murray H .; Морри младший, Чарльз Б. (1970), Вычисление колледжа с аналитической геометрией (2-е изд.), Чтение: Addison-Wesley , LCCN 76087042

